超音波ロボットの組み立て方
- 2021.05.18
- Arduino入門

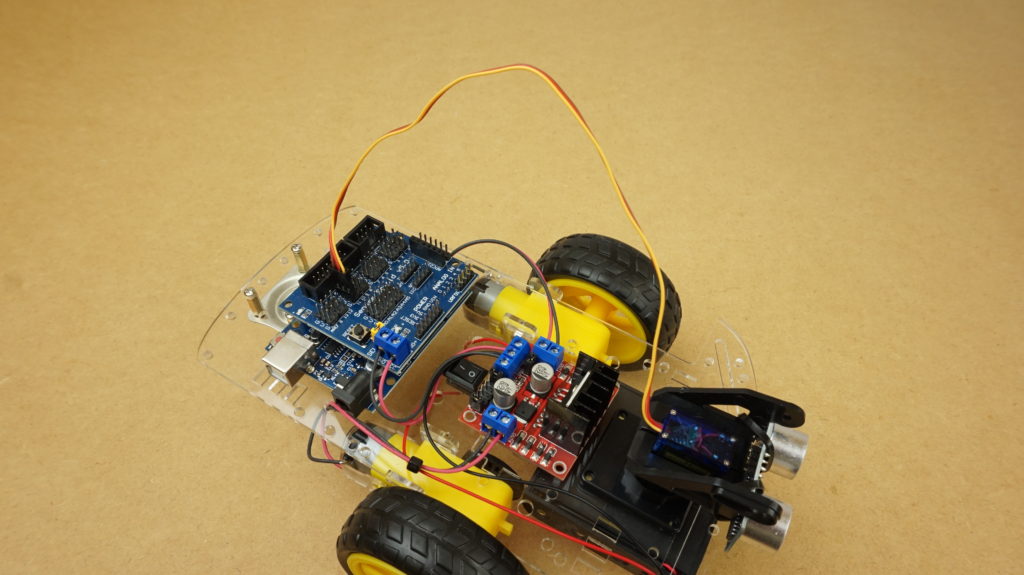
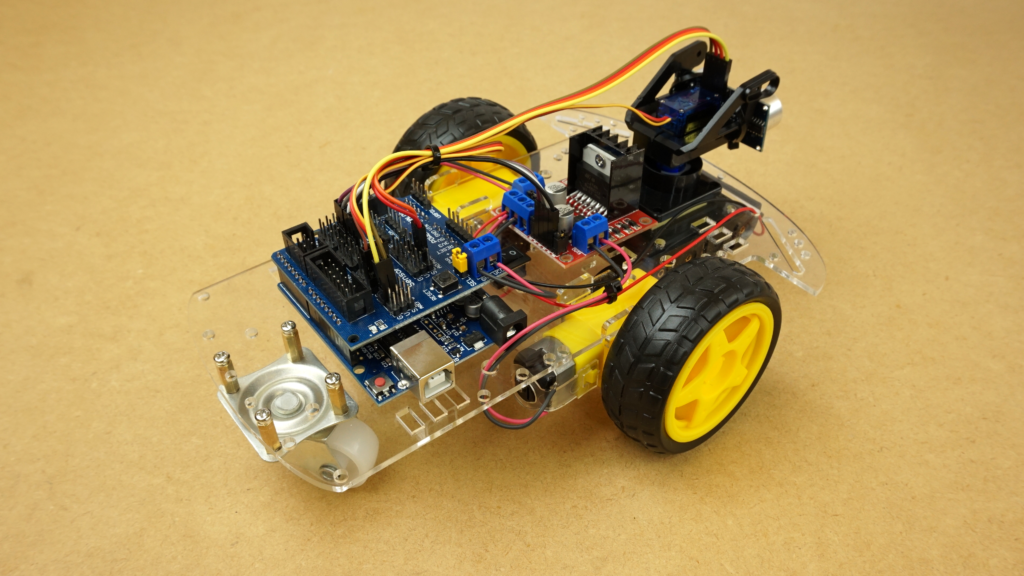
超音波ロボットとは
超音波センサーで障害物を検知して、障害物がない方向に進んでいくロボットです。
販売サイト
(準備中)
組み立て方
組み立てに必要なもの
ハンダごて ハンダ ニッパー 小さいドライバー 瞬間接着剤 カッター 定規 (すべて100円ショップで購入可能)
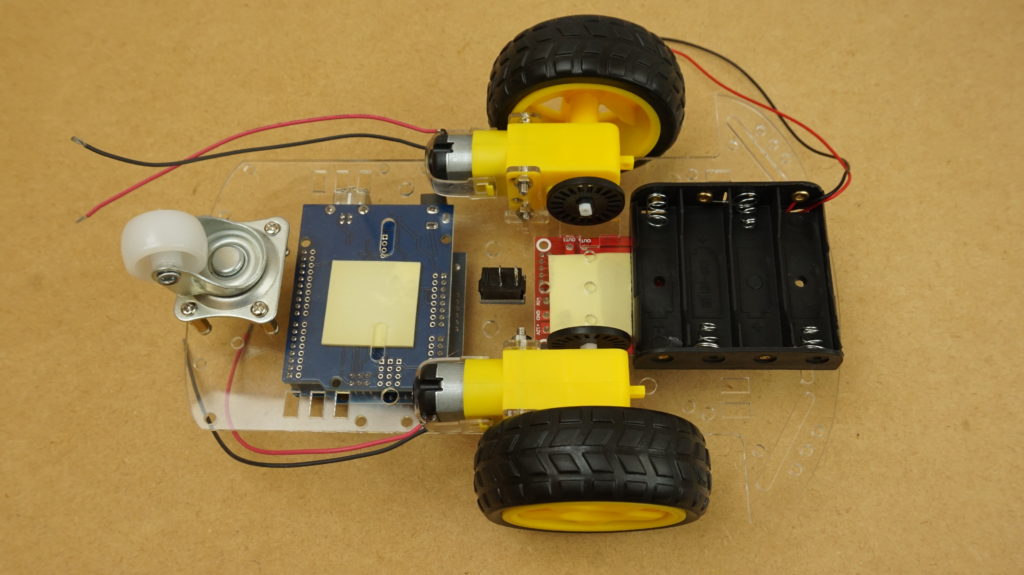
部品の取り付け
① シャシーとその部品の保護紙を剥がす
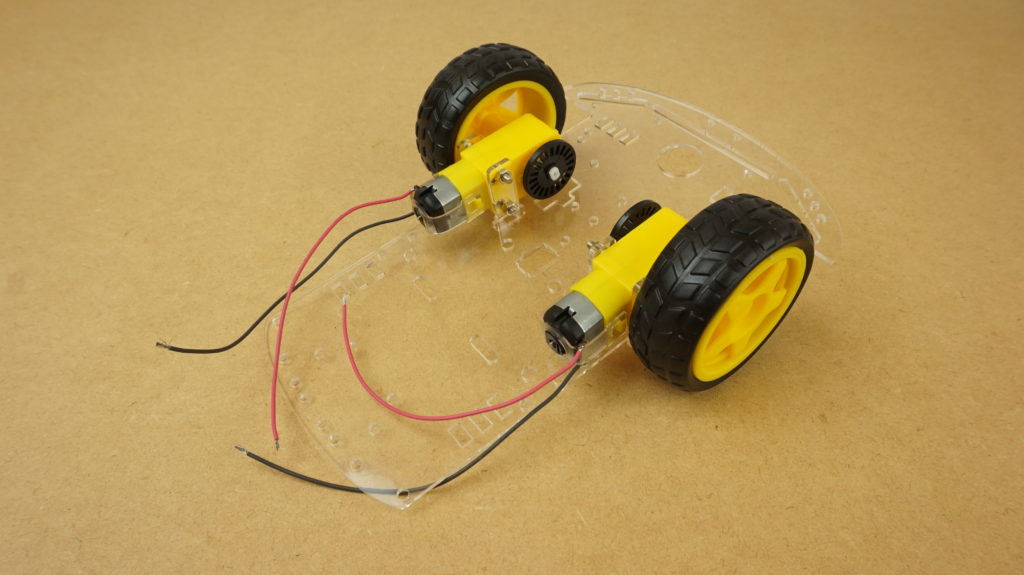
② 付属のケーブルを11cmの長さに切って、モーターの端子にはんだ付けする
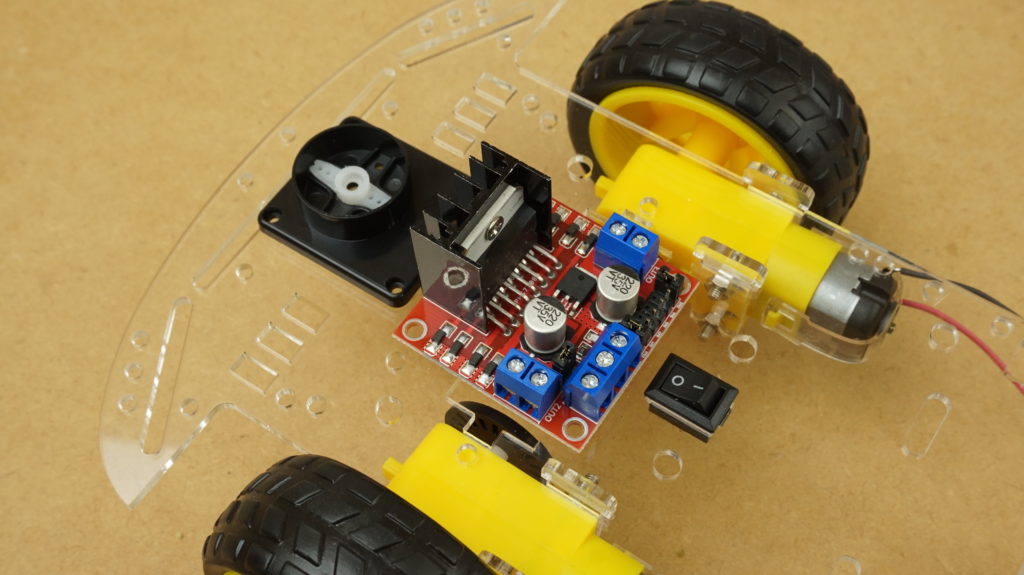
③ モーターをシャシーに固定し、タイヤと丸い部品を取り付ける
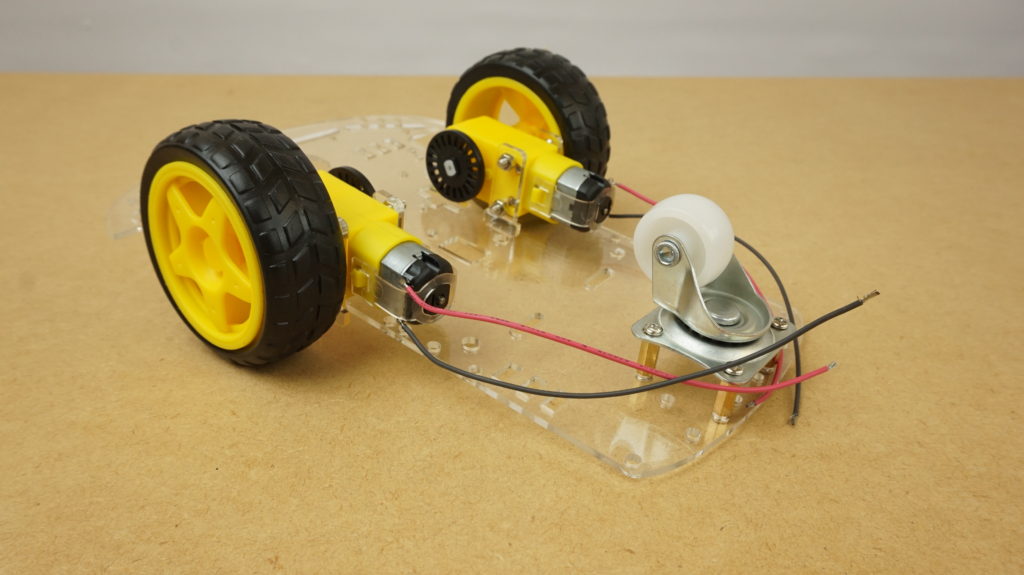
④ 補助輪を取り付ける
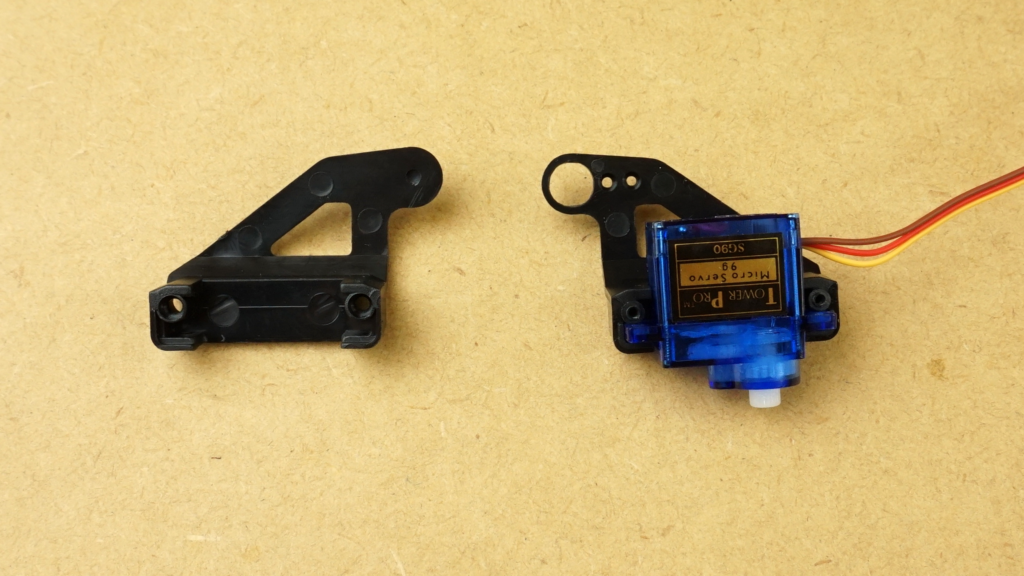
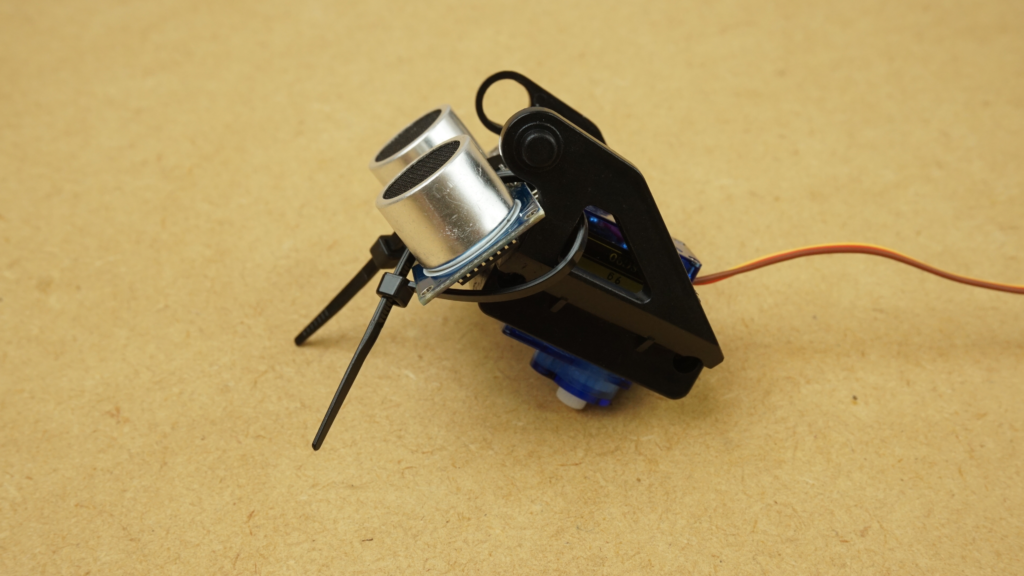
⑤ サーボモーターのアームをカットして、土台となる黒い部品に接着剤で固定する

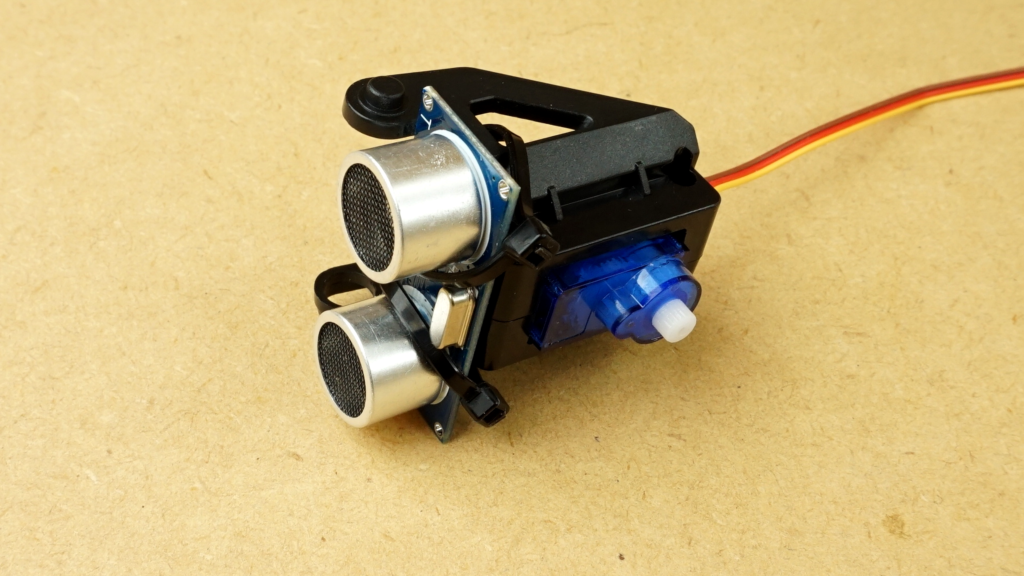
⑥ サーボモーターを黒い部品に取り付ける
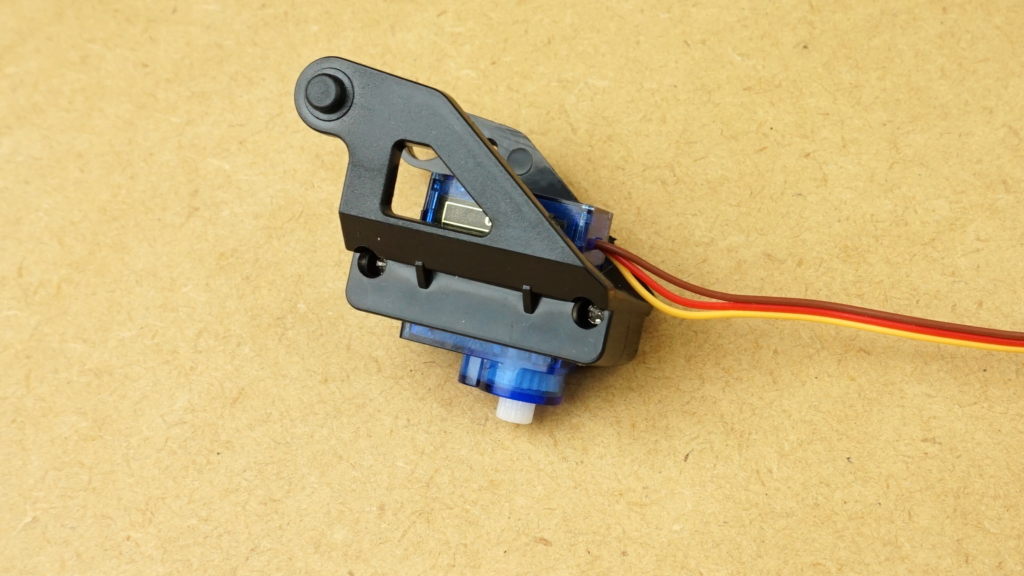
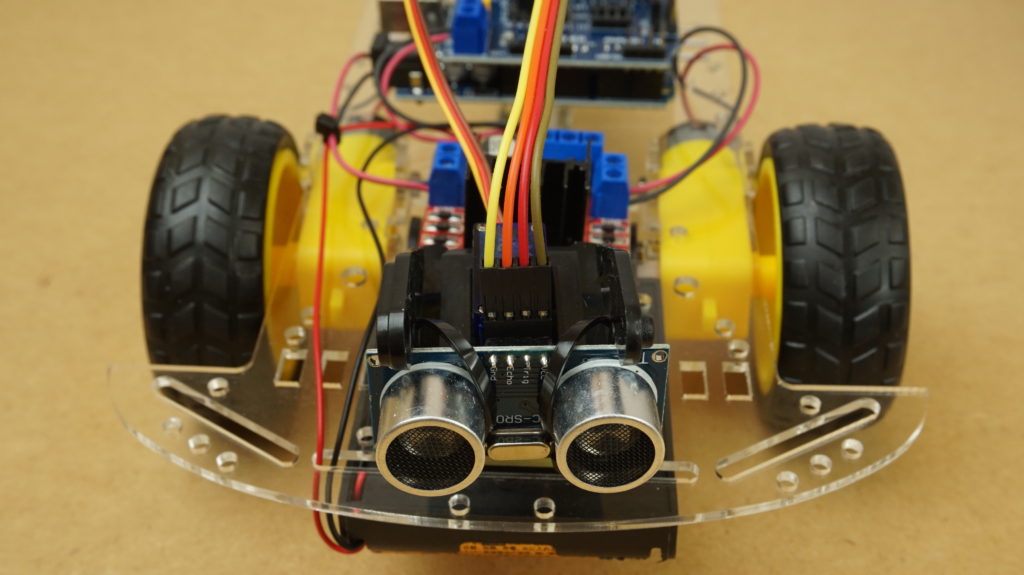
⑦ 超音波センサーとサーボモーターの部品を結束バンドで固定する
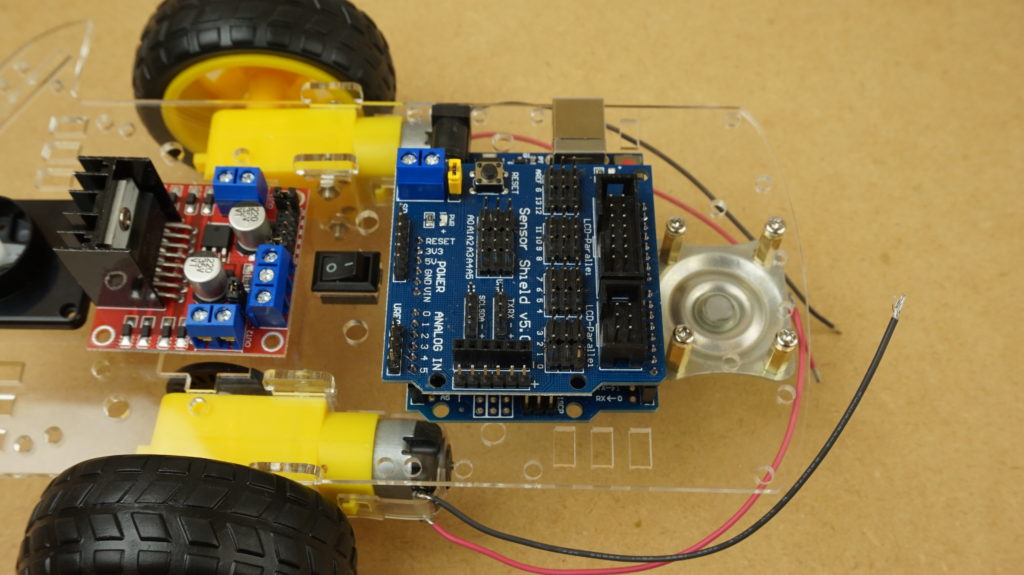
⑧ サーボモーターの土台、モーターコントローラー、マイコンボード/センサーシールドをシャシー上面に両面テープで固定し、スイッチを取り付ける(付属の両面テープは業務用の強力なものなので、強引に剥がすとABS樹脂製のシャシーを壊す恐れがあるので、間違って貼り付けた場合は、リムーバーなどを使って慎重に剥がしてください)
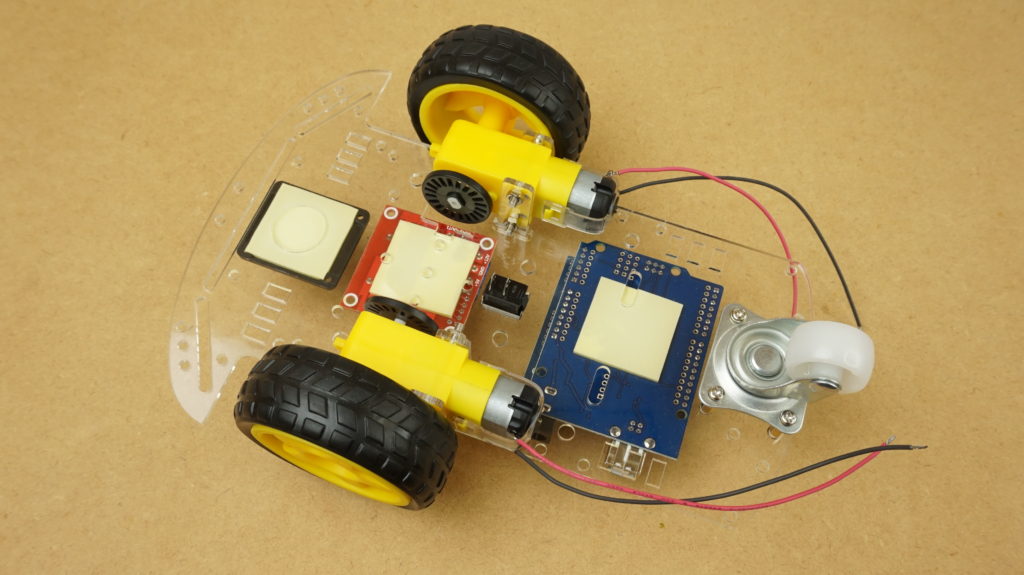
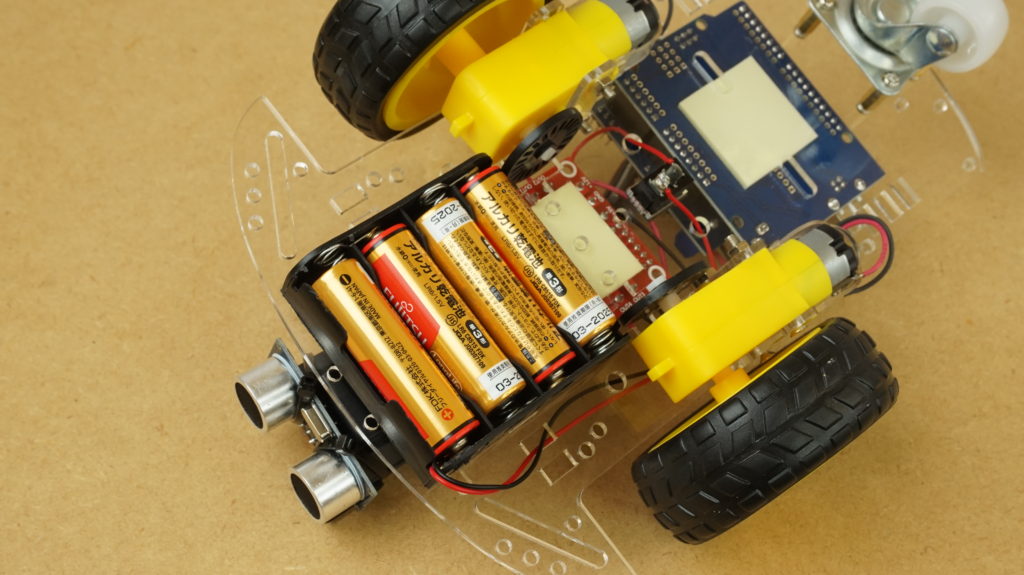
⑨ シャシー下面にバッテリーボックスを取り付ける
配線
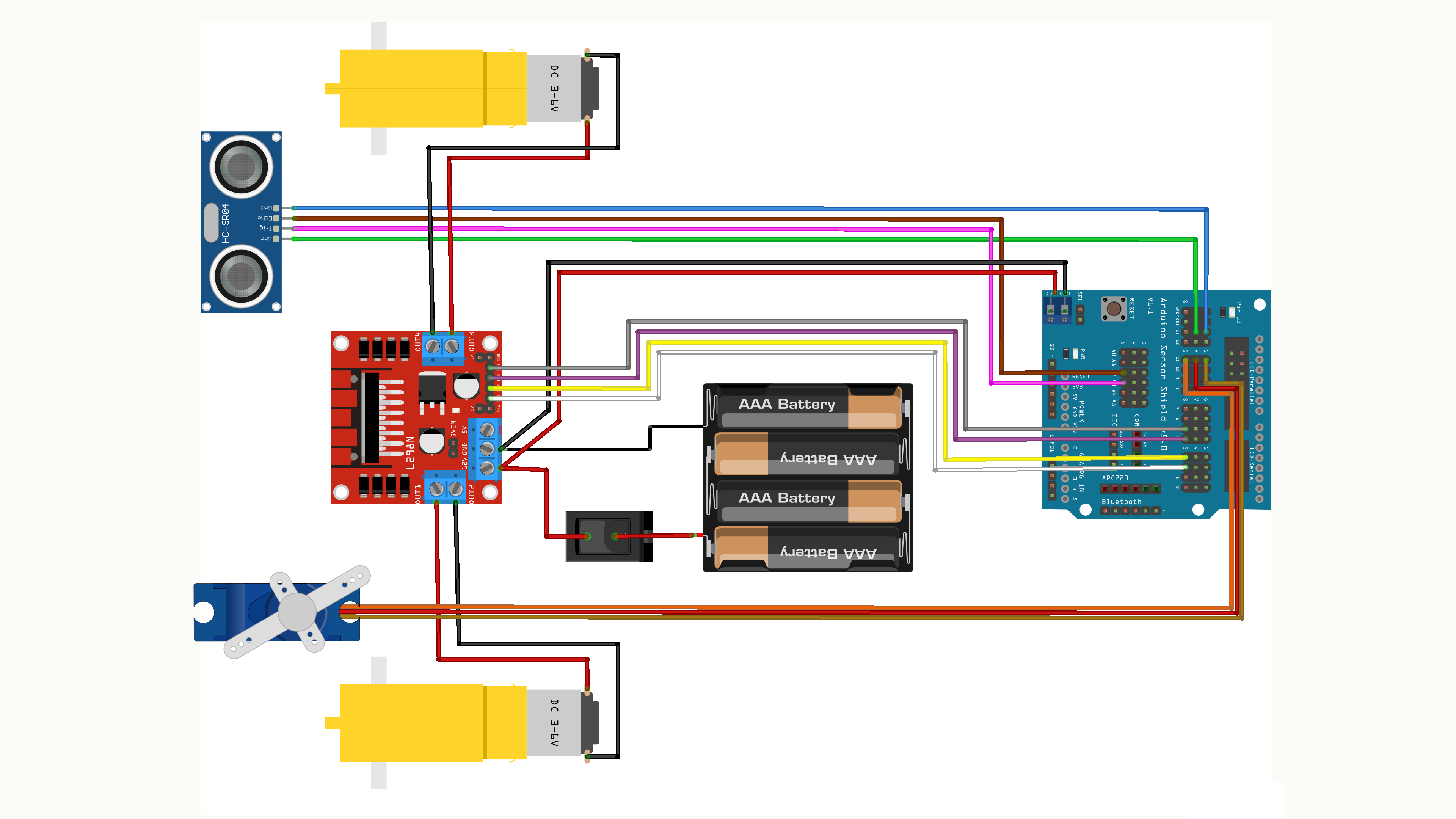
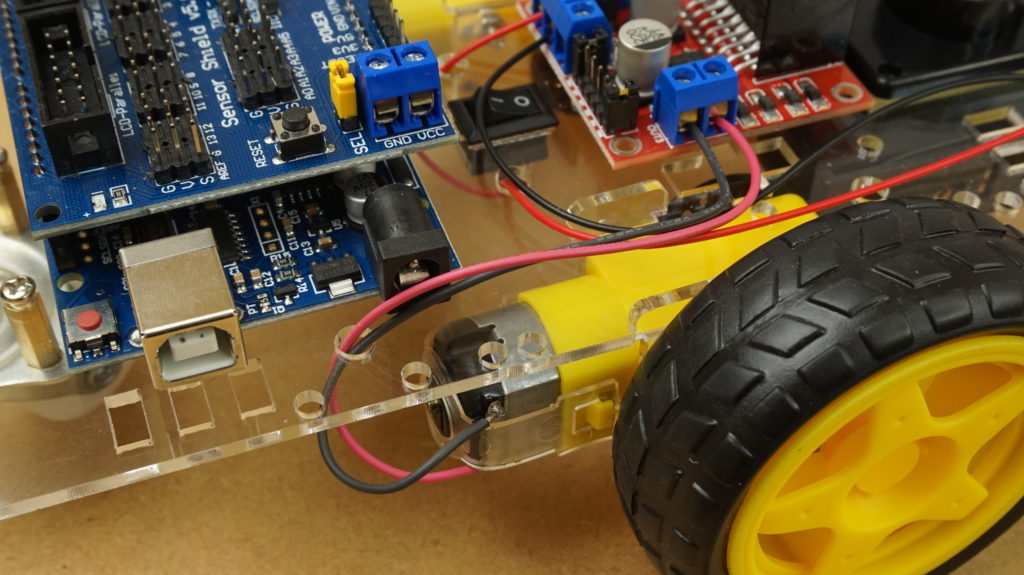
① バッテリーボックスの赤いケーブルを18cm、黒いケーブルを20cmの長さにカットして、穴を通してシャシー上面に持ってきて、赤いケーブルを再度穴から通してシャシー下面に持ってきて、スイッチの端子とはんだ付けする
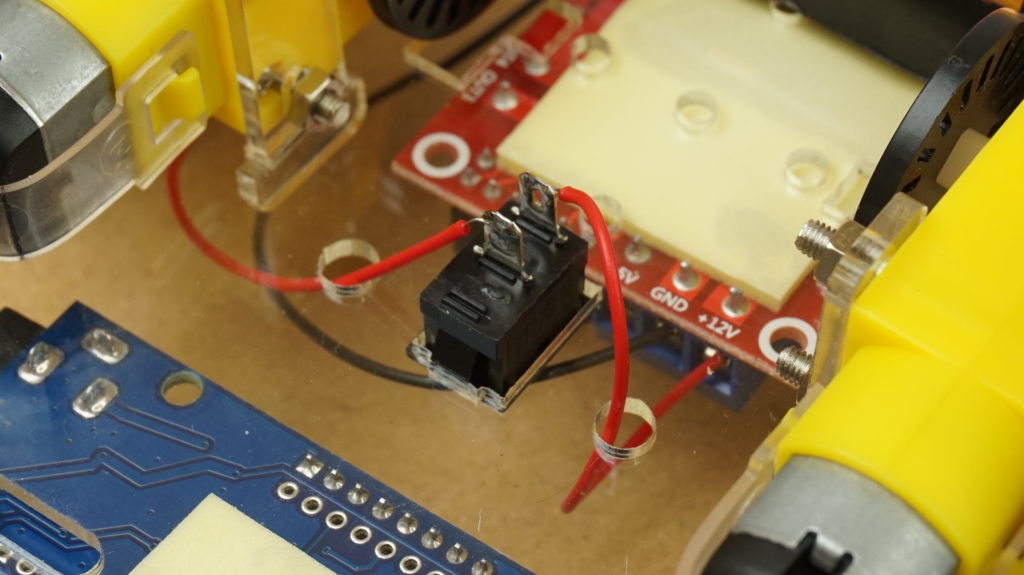
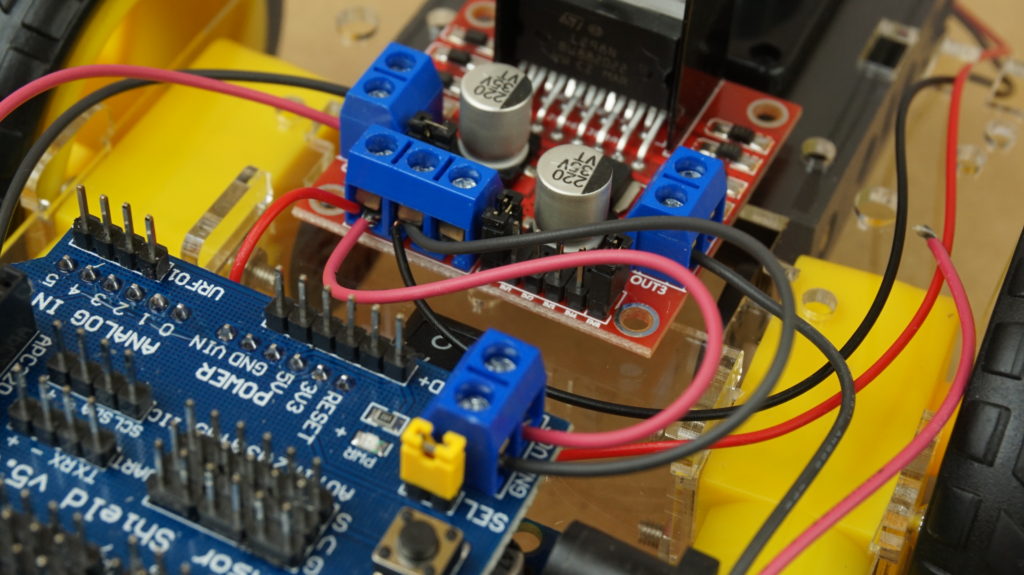
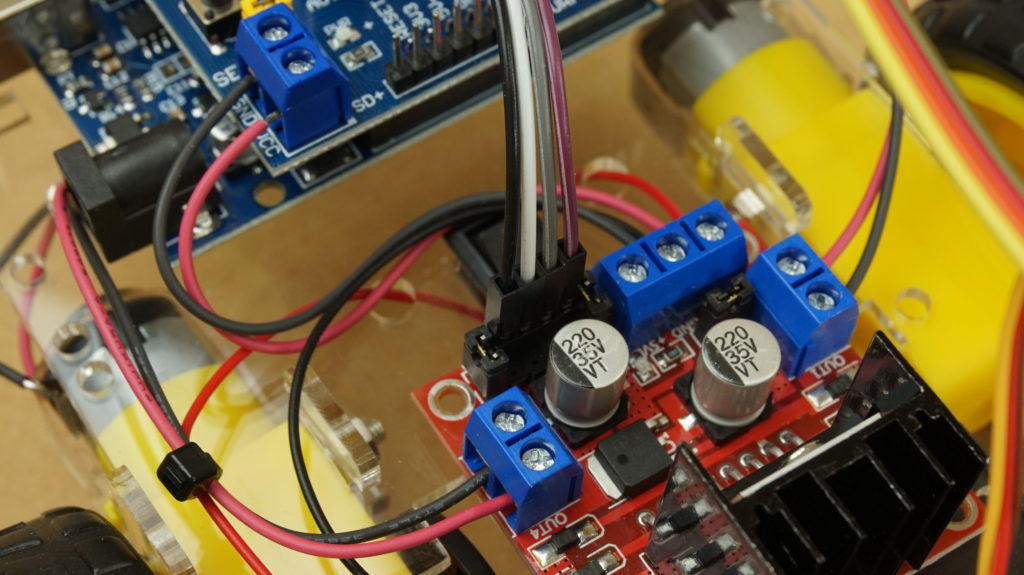
スイッチのもう片方の端子に、残りの赤いケーブルをはんだ付けして穴を通してシャシー上面に持ってきて、モーターコントローラーの12V端子にネジで固定する
バッテリーボックスの黒いケーブルはモーターコントローラーのGND端子に接続する
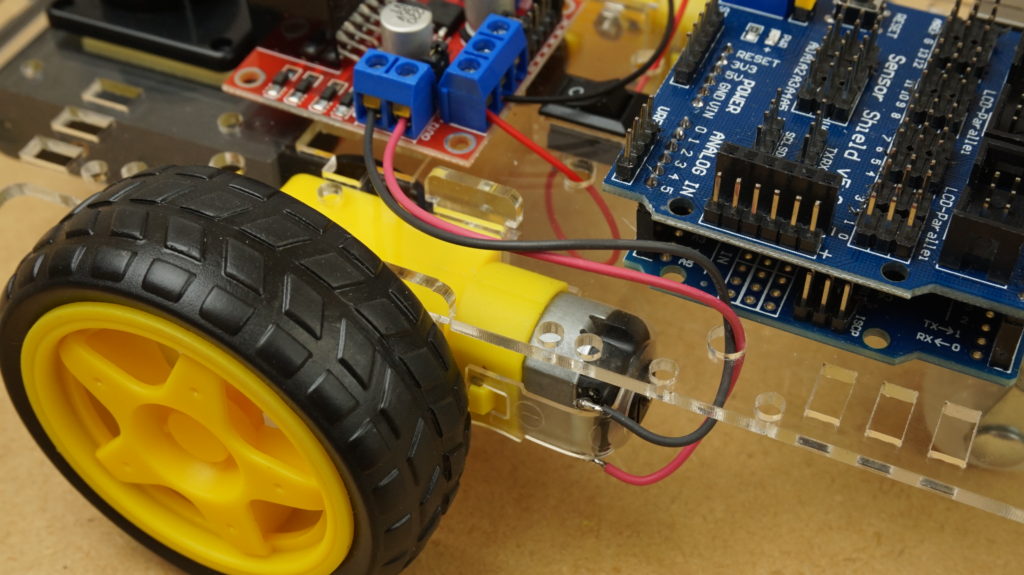
② モーターのケーブルを穴を通してシャシー上面に持ってきて、モーターコントローラー横の端子に接続する
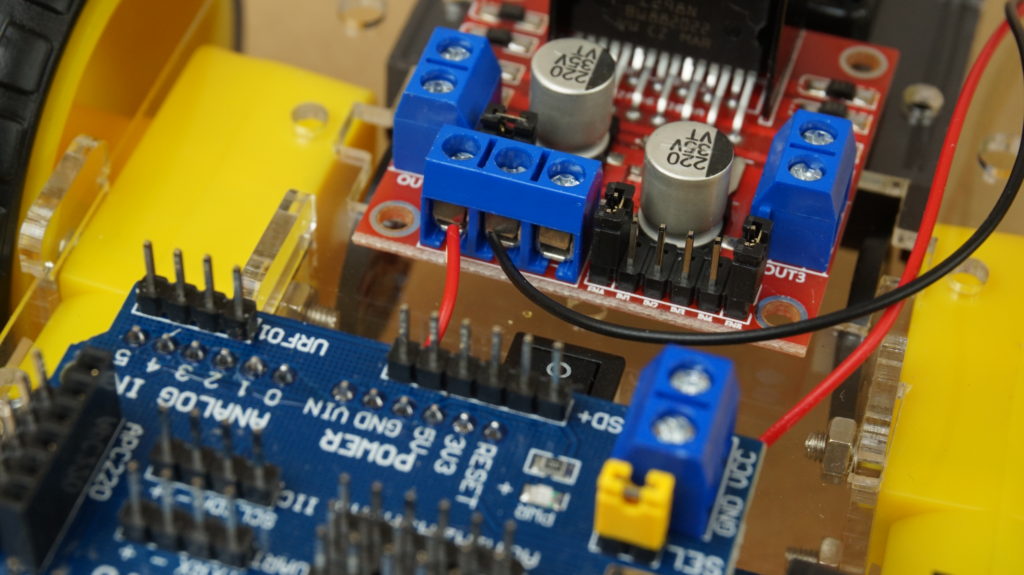
③ 付属のケーブルを10cmの長さに切って、モーターコントローラーの電源端子とセンサーシールドの電源端子を接続する
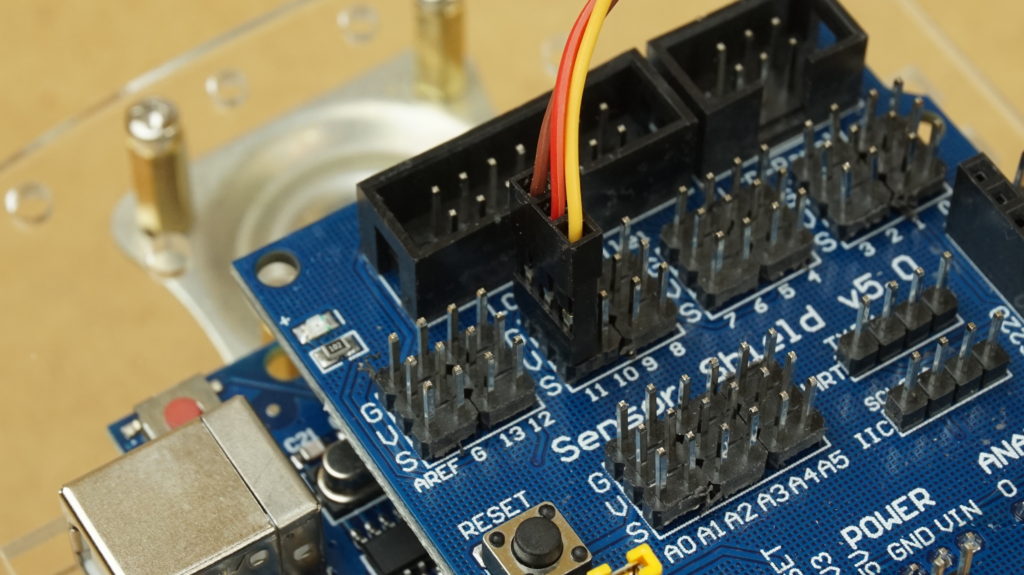
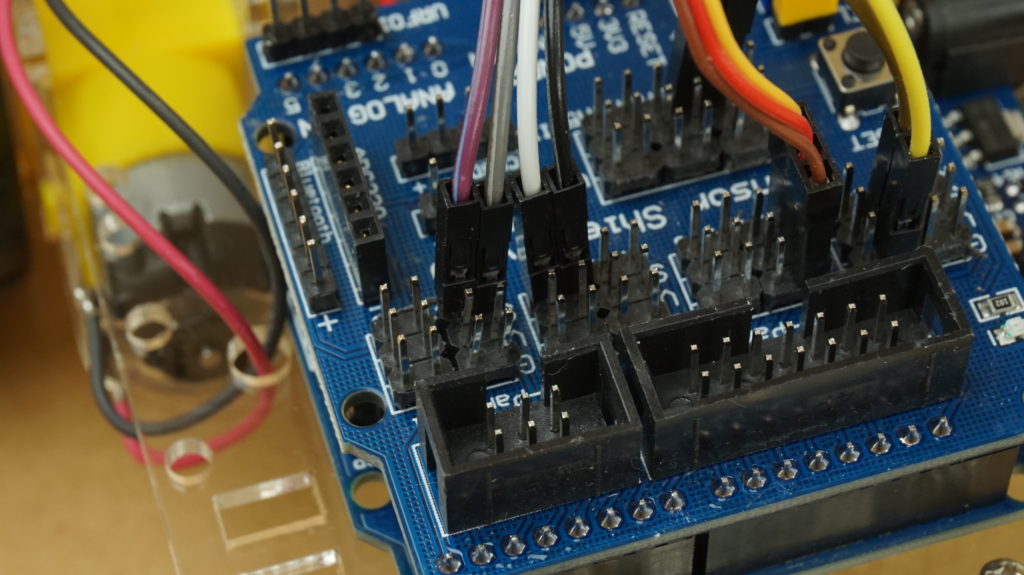
④ サーボモーターを土台に取り付けて、ケーブルをセンサーシールドの11番ピンに接続する
黄色:11S / 赤:11V / 茶:11G
⑤ 20cmの4連ケーブルで、超音波センサーとセンサーシールドを接続する
VCC:13V / Trig:A3S / Echo:A2S / GND:13G
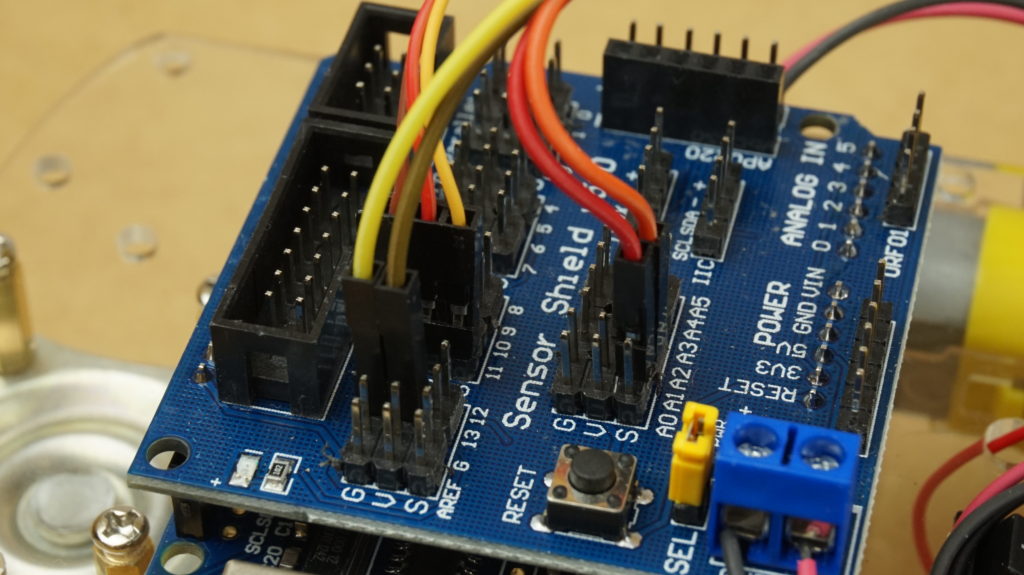
⑥ 10cmの4連ケーブルで、モーターコントローラーとセンサーシールドを接続する
in1:2S / in2:3S / in3:4S / in4:5S
⑦ ケーブルを結束バンドでまとめる
スケッチの書き込み
① スケッチをダウンロード
② NewPingのライブラリ NewPing_v1.9.1.zip をダウンロードする
③ robot.zipのスケッチを開き、メニューの「スケッチ」>「ライブラリをインクルード」> 「.ZIP形式のライブラリをインクストール」を選択して、ダウンロードした NewPing_v1.9.1.zip を選択して NewPing のライブラリをインストールする
④ USBケーブルでパソコンとロボットを接続し、スケッチを書き込む
⑤ 書き込みが終わったらUSBケーブルを外して、スイッチをオフにして乾電池を入れる
⑤ スイッチをオンにする
うまく動かない時
● スケッチを書き込むときに、パソコンがマイコンボードを認識しない
再度マイコンボードの初期設定を行ってください。
①デバイスマネージャーの「ポート(COM と LPT)」からマイコンボードの COMポート番号を確認
② IDEのメニューの「ツール」>「シリアルポート」からマイコンボードのCOMポート番号を選択して設定
● 超音波センサーの首振りの角度がおかしい
サーボモーターを土台から一度外して、正しい角度に合わせて再度土台に差し込んでください。
● 前進しないでバックする / その場でくるくる回る
モーターからモーターコントローラにつながる赤/黒の配線のプラスとマイナスを入れ替えてください。
● タイヤが動かない
バッテリーの電圧が5V以上あるか、L298Nモーターコントローラーの端子に電圧が来ているか、モーターコントローラーの端子からケーブルが外れていないか確認してください。
-
前の記事
robot.zip ダウンロード 2021.05.17
-
次の記事
robot.inoの解説 2021.05.19